В работе получено решение задачи о жесткой посадке спускаемого аппарата «Марс-6», который в ходе своей миссии в 1973 г. разбился о поверхность Красной планеты. Для уточнения обстоятельств жесткой посадки выполнено численное моделирование удара аппарата о грунт Марса в программной системе LS-DYNA. Результаты моделирования сопоставлены с данными спутниковой съемки.
Авторы: И.А. Долгов, Ю.В. Новожилов, Д.С. Михалюк - АО«ЦИФРА».
Консультант: В.Ю. Егоров*
«Марс-6» — автоматическая межпланетная станция, которая была запущена в СССР в 1973 году. Космический аппарат состоял из космического перелетного блока, и посадочного модуля - спускаемого аппарата. Орбитальная станция «Марс-6» осталась в поясе астероидов, а спускаемый аппарат на этапе спуска успел развернуть парашют и проанализировать состав атмосферы, но в момент включения тормозных ракетных двигателей связь с ним прервалась. Для исследования причин и последствий аварии место крушения изучается методами анализа спутниковой фотосъемки. Сегодня поиск «Марса-6» возможен благодаря американскому спутнику MRO, который снимает поверхность Марса, с детализацией до 26 см. Именно таким способом в 2013 г. Виталием Егоровым*, работавшим в составе группы энтузиастов, на дне гигантского кратера Птолемея был найден аппарат «Марс-3».
Вследствие того, что посадка «Марса-6» скорее всего была аварийная, элементы аппарата и парашюта могут быть видны недостаточно четко даже на спутниковой фотографии с большой детализацией. Аппарат после соударения с поверхностью планеты на большой скорости мог оставить кратер и отскочить на существенное расстояние. Для более детального анализа последствий жесткой посадки необходимо применять современные методы численного моделирования, которые позволяют напрямую моделировать процесс удара спускаемого аппарата о поверхность планеты. По результатам подобного расчета можно определить размеры кратера, который может образоваться при ударе спускаемого аппарата с заданной скоростью, а также расстояние, на которое отлетает спускаемый аппарат после первичного касания поверхности планеты. Таким образом, зная значения данных параметров, можно сократить количество зон поиска на спутниковой съемке и определить местоположение спускаемого аппарата на поверхности планеты.
Для прогнозирования размера кратера от удара при жесткой посадке аппарата «Марс-6» в работе поставлены и решены следующие задачи:
- Создание расчетной модели спускаемого аппарата с максимально достоверными массово-жесткостными характеристиками;
- Cоздание расчетной модели грунта Марса в месте посадки, с учетом нелинейных физико-механических свойств грунта;
- Проведение многовариантного исследования соударения аппарата «Марс-6» с грунтом Марса при разных скоростях и углах падения;
- Проведение сравнения размеров полученного кратера при численном моделировании с размерами кратера на данных со спутниковой съемки.
Состав и результаты миссии «Марс-6»
В 1973 г. с левой пусковой установки площадки №81 космодрома Байконур был запущен космический аппарат «Марс-6» (экспедиция М-73). Цели данного аппарата можно разделить на два больших блока задач: цели подлетного аппарата и цели спускаемого аппарата (СА). Целями подлетного аппарата являлись: изучение состава и плотности атмосферы, изучение рельефа, определение яркостной температуры атмосферы, измерение магнитного поля. Целями спускаемого аппарата являлись: измерение характеристик атмосферы по высоте, измерение химического состава атмосферы, исследование поверхностных пород, получение первых снимков с поверхности Марса, определение механических характеристик поверхностного слоя грунта.
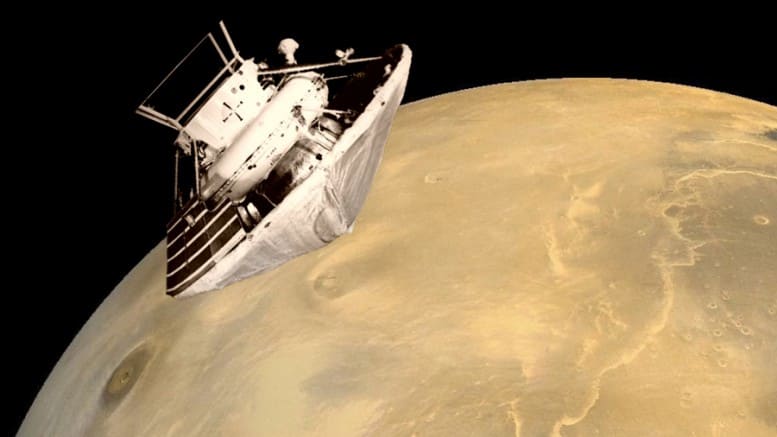
Рисунок 1. Орбитальный и спускаемый аппарат «Марс-6» [http://zelenyikot.com/mars-6/]
Во время части экспедиции, предназначенной для доставки СА на поверхность планеты, схема отделения и посадка на поверхность планеты происходили следующим образом. Спускаемый аппарат входит в атмосферу при угле 11.7° входа со скоростью 5600 м/c. На участке пассивного аэродинамического торможения, устойчивость СА обеспечивалась его формой и центровкой. При достижении скорости в 600 м/c была введена в действие парашютная система. При парашютном спуске на высотах от 20 км проводились измерения температуры, давления, химического состава атмосферы. Результаты передавались на пролетный аппарат, но полезная информация была выделена только с радиокомплекса СА. Непосредственно перед посадкой связь с СА была потеряна. Последняя полученная с него телеметрия подтвердила выдачу команды на включение двигателя мягкой посадки. Новое появление сигнала ожидалось через 143 секунды после пропадания, однако этого не произошло.
Однозначно причину неудачного завершения работы СА определить не удалось. К наиболее вероятным версиям относятся следующие:
- аппарат разбился, в том числе, по причине отказа радиокомплекса при скорости спуска 60 м/с;
- к аварийной ситуации привело превышение амплитуды колебаний аппарата под действием марсианской бури в момент включения двигателей мягкой посадки.

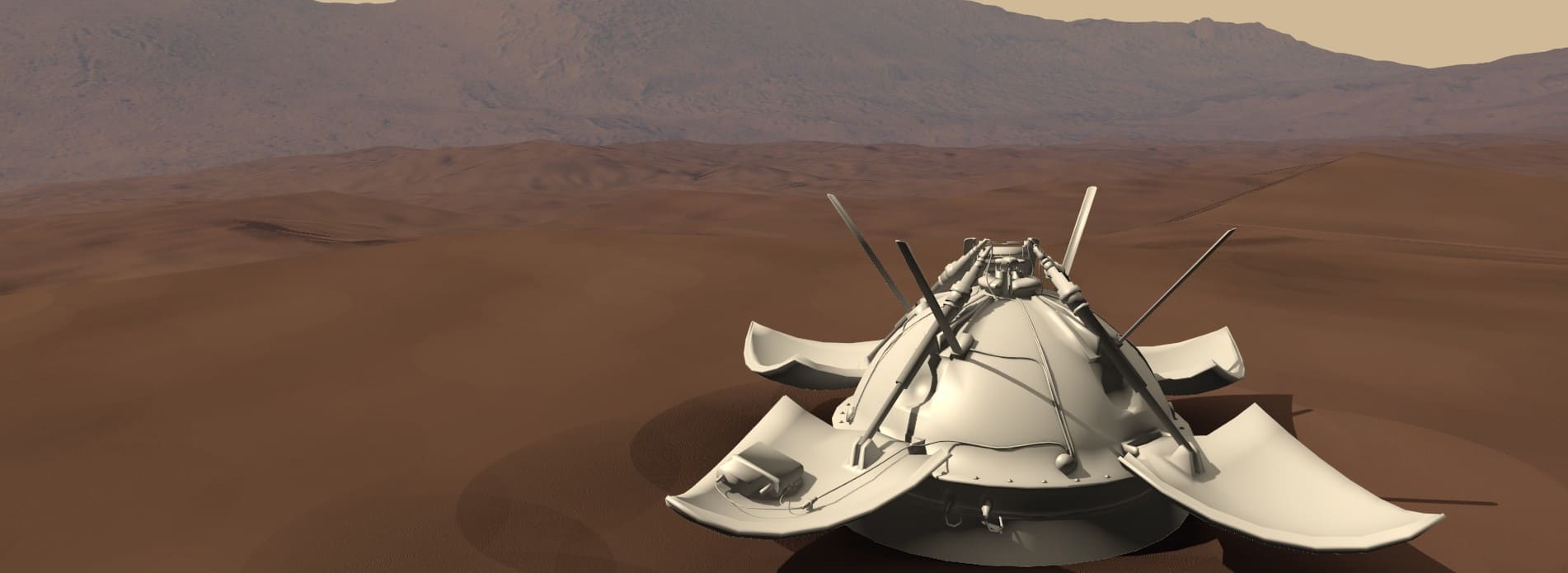
Рисунок 2. Макет аппарата «Марс-3» после жесткой посадки
Среди результатов данной миссии можно выделить то, что впервые на Землю были переданы данные о параметрах марсианской атмосферы, проведены измерения химического состава атмосферы, давления, окружающей температуры. Результаты этих измерений были весьма важны как для расширения знаний о планете, так и для выявления условий, в которых должны работать будущие марсианские станции.
В настоящее время, ведутся поиски места падения СА «Марс-6», для этого специалисты и энтузиасты проводили визуальный просмотр и анализ снимков высокого разрешения предполагаемой зоны падения, которые сделаны спутником Mars Reconnaissance Orbiter. В качестве предполагаемых мест падения выбраны несколько кратеров и поэтому для получения уточненных данных было решено прибегнуть к современным методам численного моделирования физических процессов.
Геометрия и конструкционные решения СА «Марс-6»
На рисунке 3 представлен общий вид спускаемого аппарата «Марс-3» в разрезе и фотография макета аппарата. Модель аппарата «Марс-6» построена на основе данных об аппарате «Марс-3», т.к. с точки зрения массово-жесткостных характеристик они являются сходными.

Рисунок 3. Конструкция СА «Марс-3»
Основными параметрами СА, которые влияют на формирование кратера при ударе, являются масса СА и его амортизирующие элементы конструкции. Общая масса аппарата «Марс-6» составила 3880 кг, из них масса научной аппаратуры орбитального отсека — 114 кг, масса спускаемого аппарата — 1000 кг. Корректирующая двигательная установка была заправлена 598 кг топлива. Масса спускаемого аппарата при входе в атмосферу Марса — 844 кг. Масса автоматической марсианской станции после посадки — 355 кг, из них масса научной аппаратуры — 19 кг. Стоит отметить, что центр масс СА «Марс-6» находится в нижней трети аппарата для того, чтобы создавался эффект «неваляшки» и аппарат всегда переворачивался на днище после соударения с поверхностью планеты.
Амортизация СА «Марс-6» была выполнена из условий посадки на поверхность Марса с вертикальной скоростью до 10 м/c и боковой – до 30 м/c; действующие перегрузки не должны были превышать 180 g, в периферийных местах перегрузки не должны были превышать 240 g. Амортизация нижней части корпуса, толщиной 270 мм, состояла из трех слоев пенопласта. Снаружи амортизация СА защищалась слоем стеклотекстолита толщиной 1,5 мм. На СА предусматривался защитный кожух для оборудования станции, а также для защиты от повреждений лепестковых опор. Защитный кожух имел дополнительную внешнюю амортизацию для защиты посадочного аппарата и оборудования при повторных ударах боковой поверхностью. Амортизация задней части кожуха состояла из двух слоев пенопласта. Также для усиления конструкции введено несколько ребер жесткости и алюминиевых трубок между амортизирующим слоем и лепестками автоматической станции.
При создании расчетной модели спускаемого аппарата для точного описания физических процессов учитывались нелинейные свойства материалов, а именно, упруго-пластические свойства материалов из которых сделан кожух, внутренние элементы конструкции и энергопоглотителя - стекловолокнистого композита, сплава алюминия и пенопласта, соответственно. Для моделирования нелинейных свойств стекловолокна и сплава алюминия использовалась билинейная упруго-пластическая модель материала с кинематическим упрочнением с возможностью разрушения элементов. Для моделирования пластических свойств пенопласта (рисунок 4) использовалась модель прогрессирующего разрушения с возможностью схлопывания пор и уплотнения.

Рисунок 4. Диаграмма обжатия пенопласта ПС-1
Предполагаемая область падения СА «Марс-6»
Район посадки спускаемого аппарата «Марс-6» был выбран в низменной части Эритрейского моря в южном полушарии Марса. Спускаемый аппарат по данным обработки траекторных измерений проведенной в 1974 году совершил посадку в область с номинальными координатами 23,9° ю. ш. и 19,5° з.д. Примерное место приземление СА «Марс-6» на карте Марса показано на рисунке 5.
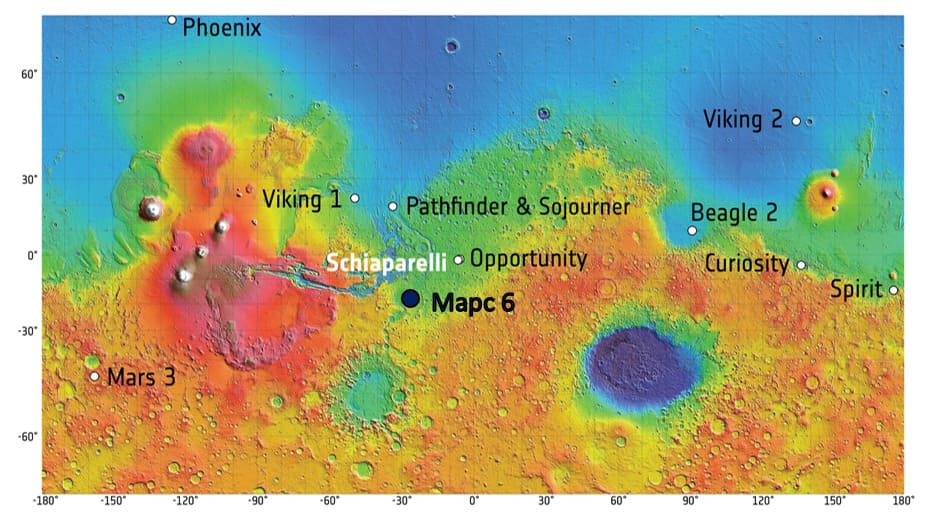
Рисунок 5. Место приземления «Марс-6»
Как видно из карты, наиболее близким удачно приземлившимся аппаратом к СА «Марс-6» является марсоход Opportunity. Так же из карты видно, что марсоход Opportunityи СА «Марс-6» находятся на одной и той же равнине, поэтому можно считать, что ландшафт и свойства реголита в области падения СА «Марс-6» близки к свойствам реголита в области приземления марсохода Opportunity. Грунт на месте приземления марсохода Opportunity представляет собой слоистую структуру. На поверхности находится эоловые наносы, которые накрывают толщу слоистого грунта.
Описание свойств эоловых песков
Эоловые пески – это мелкодисперсная структура, которая образуется в ходе действия ветровой эрозии. Это легкая и сыпучая структура, которая имеет размер зерен 0,1-10 мкм. Виды различных эоловых песков представлены на рисунке 6.

Рисунок 6. Эоловые пески на поверхности Марса
Физико-механические свойства эоловых песков представлены в таблице 1.
Таблица 1. Физико-механические свойства эоловых песков Марса
| Физические свойства | Минимальное значение | Максимальное значение |
| Плотность, ρ [кг/м3] | 1000 | 1300 |
| Модуль деформации грунта, E [МПа] | 2000 | 2500 |
| Коэффициент Пуассона, µ | 0,35 | 0,35 |
| Сцепление, c [КПа] | 0,18 | 1,6 |
| Угол внутреннего трения, ϕ [°] | 15 | 21 |
Описание свойств каменистого грунта
Каменистый грунт наиболее прочный тип реголита, который формируется из смеси грунта и обломочного материала. Эоловые наносы и каменистый грунт, очевидно, образуют чехол на поверхности пород на всей поверхности равнины, на которую приземлился марсоход Opportunity и СА «Марс-6». Виды каменистого грунта представлены на рисунке 7.
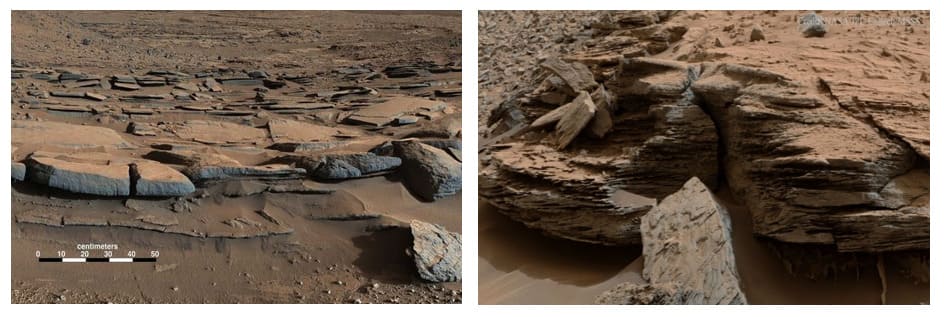
Рисунок 7. Каменистый грунт на поверхности Марса
Физико-механические свойства каменистого грунта представлены в таблице 2.
Таблица 2. Свойства каменистого грунта Марса
| Физические свойства | Минимальное значение | Максимальное значение |
| Плотность, ρ [кг/м3] | 1200 | 2000 |
| Модуль деформации грунта, E [МПа] | 4000 | 5400 |
| Коэффициент Пуассона, µ | 0,35 | 0,35 |
| Сцепление, c [КПа] | 2,4 | 7,8 |
| Угол внутреннего трения, ϕ [°] | 25 | 33 |
Для моделирования поведения грунта Марса выбрана модель Мора-Кулона, которая позволяет описывать зависимость касательных напряжений материала от величины нормальных напряжений. В основе данной модели лежит гипотеза о зависимости предельных касательных напряжений от среднего нормального напряжения, которая обусловлена внутренним трением в материале. При нагружении грунты работают преимущественно на сдвиг по поверхности с наименьшей несущей способностью. Поэтому сдвиговая прочность является определяющей прочностной характеристикой для грунтов. Разрушение реализуется в тот момент, когда величина сдвигового напряжения достигает предела прочности грунта на сдвиг. Для проведения исследований построена модель двуслойного грунта, где верхний слой является слоем эоловых наносов, а нижний слоем - каменистый грунт. Поскольку значения свойств грунта Марса не являются полностью определенными, а заданы в некоем диапазоне, то в работе выполнен анализ зависимости результатов от свойств грунта («твердый грунт» и «мягкий грунт»).
Численное решение задачи
Для численного решения задачи в качестве инструмента выбран программный комплекс LS-DYNA. Для моделирования процесса удара использовалась постановка Лагранж-Эйлерового взаимодействия на базе структурированных сеток (Structured Arbitary Lagrange Eulerian, S-ALE), которая позволяет описывать большие деформации среды без деформации конечных элементов, что приводит к более стабильным и корректным результатам. Расчетная модель аппарата «Марс-6» и области грунта представлены на рисунке 8.
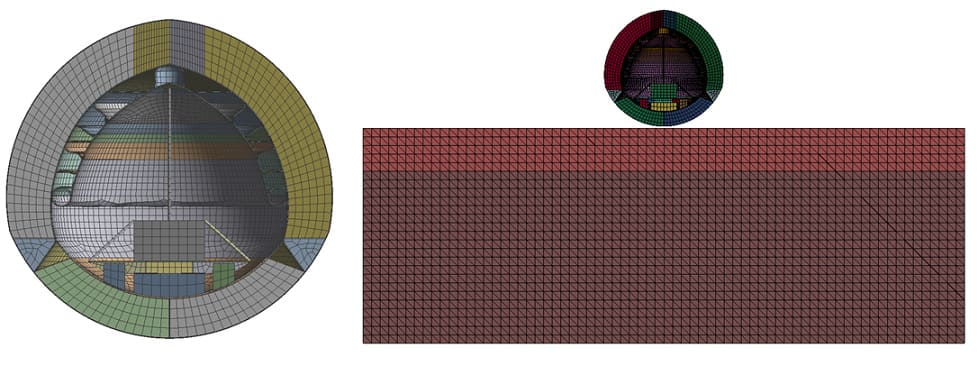
Рисунок 8. Расчетная модель аппарата «Марс-6» и грунта
Конечно-элементная модель аппарата содержит 29 232 узлов, модель области грунта - 94 500 узлов. Всего на каждом временном шаге решается порядка 400 тысяч уравнений. Время одного расчета (0,3 секунды процесса удара) занимает порядка 4-8 часов на рабочей станции с процессором Corei7.
В процессе моделирования падения аппарата «Марс-6» проведено моделирование штатной посадки для подтверждения корректности выбора расчетной модели, а также моделирование нештатной посадки под различными углами падения, с различными значениями физико-механических параметров материала грунта. Пример результатов расчета с начальной скоростью 60 м/с и углом атаки 10 градусов представлен на анимации. Процесс включает в себя соприкосновение аппарата с грунтом, упруго-пластическую деформацию аппарата и грунта в области удара, отскок аппарата и разлет элементов грунта.
В результате многовариантного моделирования получены диапазоны значений ширины кратера после падения СА «Марс-6», которые представлены на рисунке 9.
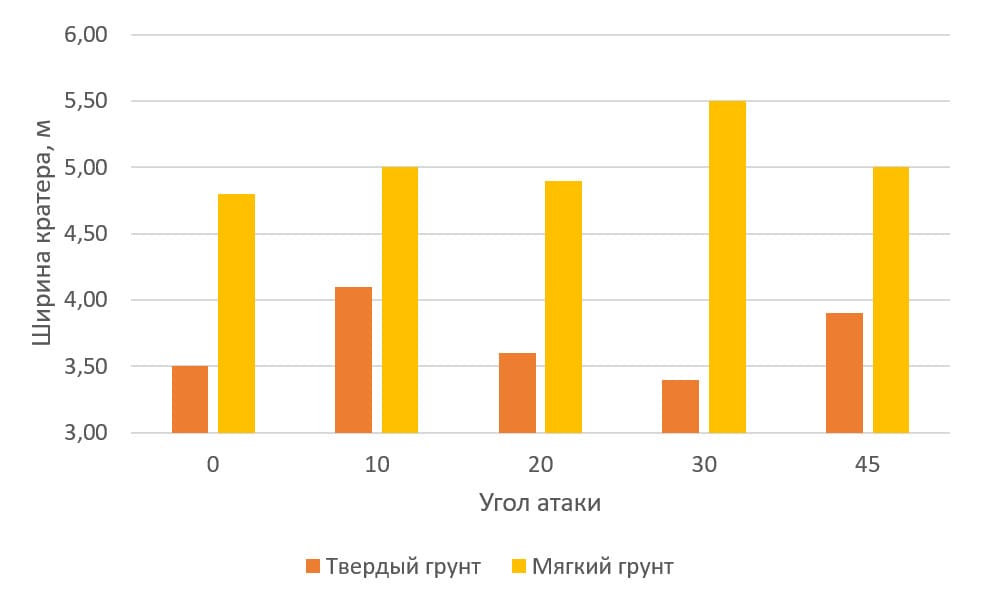
Рисунок 9. Диапазоны возможных диаметров кратеров после падения СА «Марс-6»
При всех возможных вариантах углов падения СА «Марс-6» ускорение на аппаратуре превосходит критическое ускорение из чего следует, что СА во всех представленных случаях выходит из строя.
В результате моделирования определено, что ширина кратера, в зависимости от угла падения, варьируется от 3,5 м до 4,2 м при падении СА «Марс-6» в «твердый грунт» и от 4,6 м до 5,5 м при падении в «мягкий грунт». Расстояние до повторной точки контакта (Рисунок 10) варьируется от 0 м до 46 м при падении в «мягкий грунт» и от 0 м до 99 м при падении в «твердый грунт» в зависимости от угла падения СА «Марс-6».

Рисунок 10. Диапазоны возможных диаметров кратеров после падения СА «Марс-6»
При рассмотрении предполагаемой области падения СА «Марс-6», определенной Антоном Громовым, на фотографии со спутниковой съемки (рисунок 11), можно заметить, что расстояние между кратерами примерно равно 9 м, когда ширина самого кратера равна примерно 4 м. Данные значения соответствуют диапазонам полученным данных численного моделирования, поэтому можно говорить, что данный кратер мог остаться после удара именно СА «Марс-6». Необходимо дальнейшее изучения данного предполагаемого места падения методами высокоточной спутниковой фотосъемки.
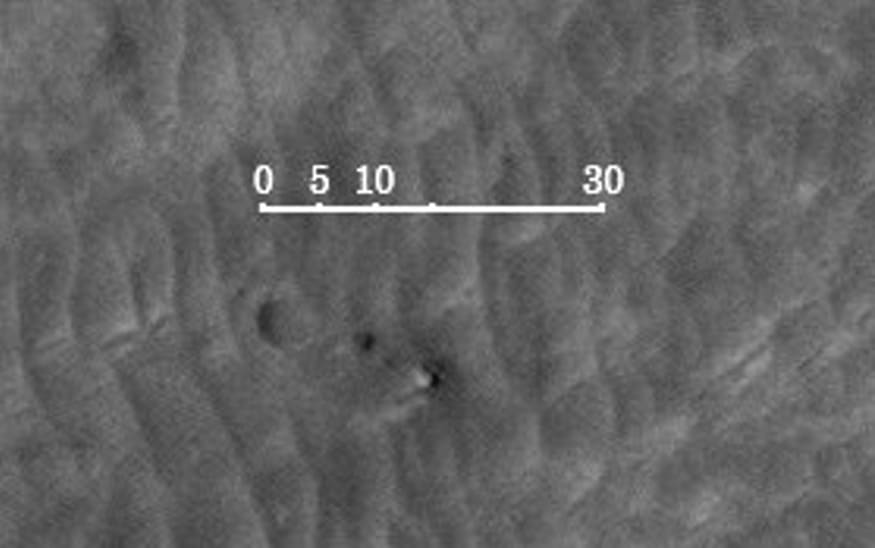
Рисунок 11. Предполагаемое место падения СА «Марс-6»
В результате выполнения работы получены следующие результаты:
- Выбрана методика численного моделирования, создана модель СА «Марс-6» и выбрана модель Марсианского грунта;
- Проведена валидация расчетной модели на моделировании штатной посадки;
- Получены результаты моделирования падения аппарата «Марс-6» в нештатном режиме;
- По результатам многовариантного моделирования определены размеры кратера от ударов под различными углами для разной твердости грунта;
- Определены возможные расстояния до точки вторичного контакта с поверхностью.
* Физическое лицо, выполняющее функции иноагента в России
Литература
- Croop B. Lobo H. Selecting Material Models for the Simulation of Foams in LS-DYNA [Журнал]. - NY : 7th European LS-DYNA Conference, 2009 г.
- Evans Jonson, Walker An Eulerian approach to soil impact analysis for crashworthiness applications [Журнал]. - Durban : International Journal of Impact Engineering, 2010 г.
- Fasanella Jackson, Kellas Soft Soil Impact Testing and Simulation of Aerospace Structures [Журнал]. - Hampton : Proceedings of the 10th LS-DYNA Users Conference, 2008 г.
- Hallquist LS-DYNA Keyword User Manual [Книга]. - Livermore : Livermore Software Technology Corporation, 2007.
- Ozturk U. E. Anlas G. Finite element analysis of expanded polystyrene foam under multiple compressive loading and unloading [Журнал]. - Gebze : Materials and Design, 2010 г.
- Qasim H. Shah A. Topa Modeling Large Deformation and Failure of Expanded Polysterene Crushable Foam Using Ls-Dyna [Журнал]. - Kuala Lumpur : International Islamic University Malaysia, 2013 г.
- Баженов Котов Математическое моделирование нестационарных процессов удара и проникания осесимметричных тел и идентификация свойств грунтовых сред [Книга]. - Москва : ФИЗМАТЛИТ, 2011.
- Григорян Об основных представлениях динамики грунтов [Книга]. - Москва : ПММ, 1960.
- Демидов Н.Э. Базилевский А.Т. Грунт Марса: разновидности, структура, состав, физические свойства, буримость и опасности для посадочных аппаратов [Статья] // Астрономический вестник. - Москва : [б.н.], 2015 г. - 49(4).
- Ковтуненко Проектирование спускаемых автоматических космических аппаратов: опыт разработки диалоговых процедур [Книга]. - Москва : Машиностроение, 1985.
- Петров Ю.А. Макаров В.П., Колобов А.Ю., Алешин В.Ф Посадочные устройства космических аппаратов (КА) на основе пенопластов и сотоблоков [Книга]. - МГТУ им. Н.Э. Баумана : ФГБОУ ВПО "МГТУ им. Н.Э. Баумана, 2010.
.png)





